Principais comandos de C ou C++
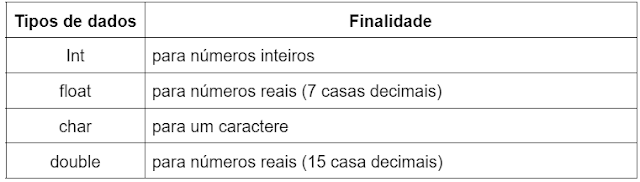
Estrutura Sequencial em C #include <nome_da_biblioteca> main( ) { bloco de comandos; } Obs: Normalmente, cada comando é finalizado com ponto e vírgula. Variável Representa uma posição de memória. Possui nome e tipo, e seu conteúdo pode variar ao longo do tempo, durante a execução de um programa. Embora uma variável possa assumir diferentes valores, ela só pode armazenar um valor de cada vez. Declaração de variáveis As variáveis sã o declaradas após a especificação de seus tipos. Exemplo: float x; int n1, n2; char tipo; char cidade[35] Declara uma variável chamada tipo em que pode ser armazenado um caractere. Declara uma variável chamada cidade...
